
Use VR equipment to move Reachy 2’s arms, hands and head. See through Reachy’s cameras to interact with the environment surrounding the robot.
With 7 DOFs, Reachy 2’s arms feature similar dimensions, proportions and movements as in an adult human arm. One arm can lift objects up to 3 kg and manipulate them with pretty good dexterity.
Reachy 2 is available on a mobile base to get access to more applications and a wider working space. Experience the easiest navigation with three omniwheels, a cylinder-like structure, many sensors and a LiDAR.
Reachy 2’s CPU-powered system offers everything you need for machine learning, delivering strong performance and seamless compatibility with modern AI frameworks. It provides all the necessary tools to explore and implement new learning models effectively, ensuring a smooth and efficient experience.
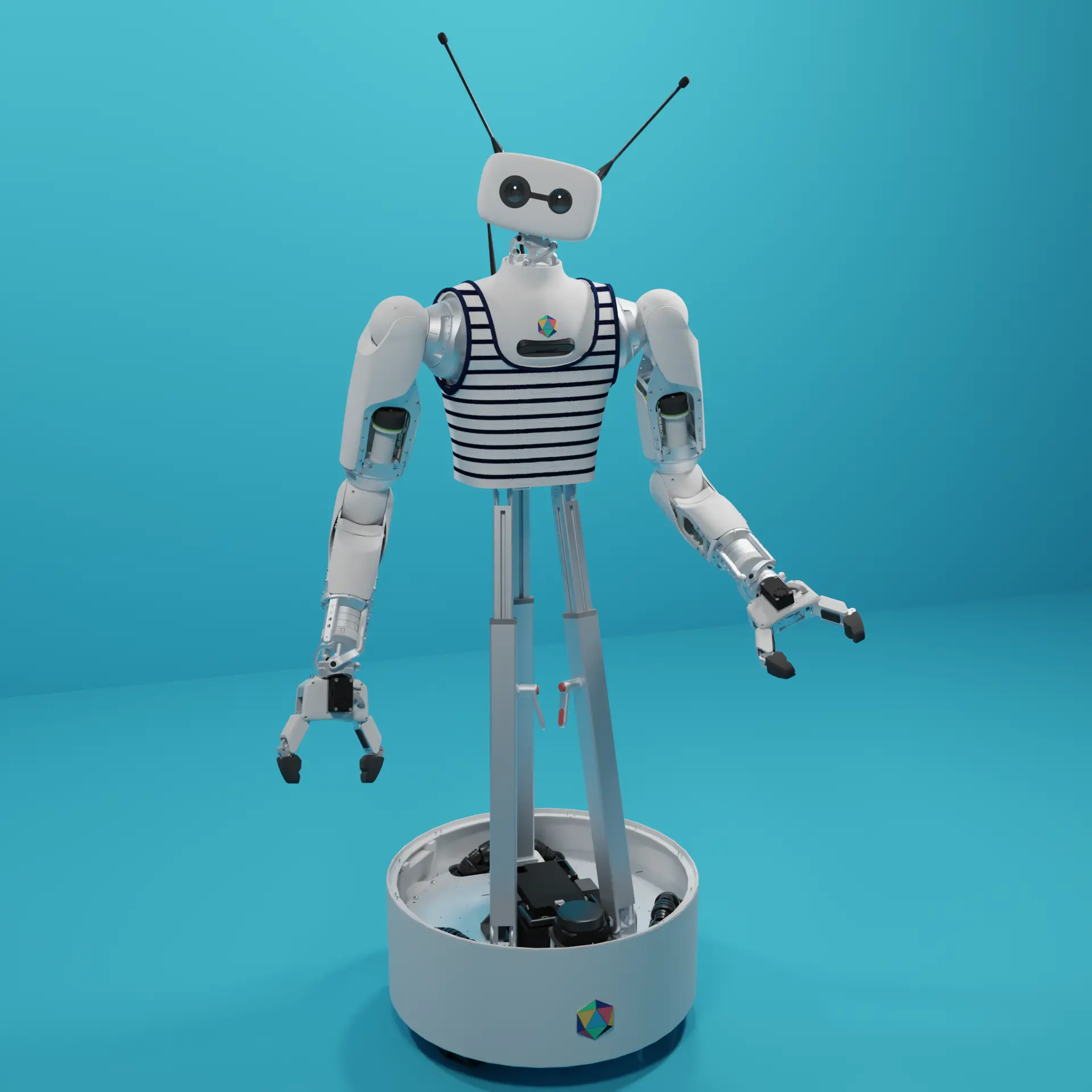
Reachy 2 Dual Arm + Mobile Base
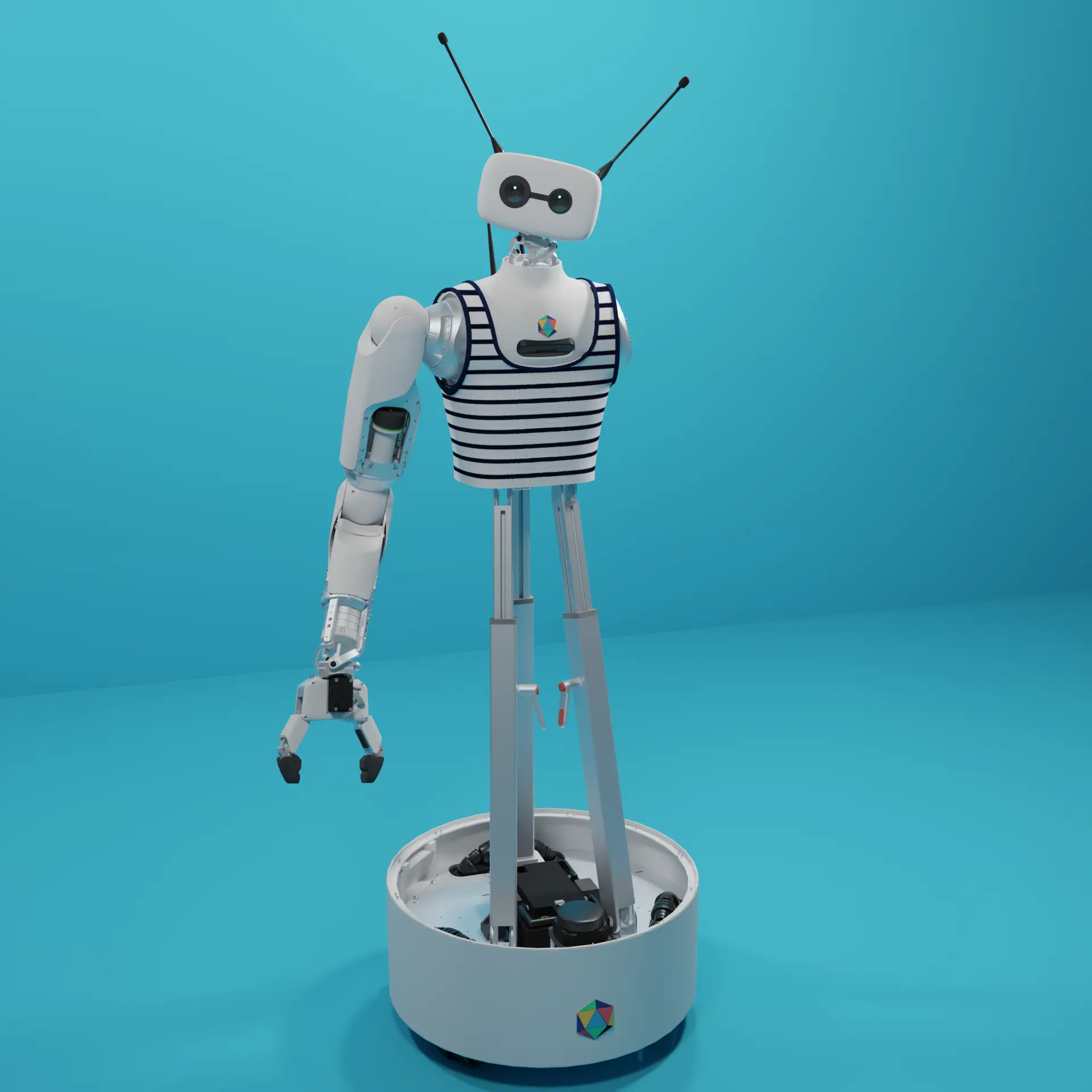
Reachy 2 Single Arm + Mobile Base
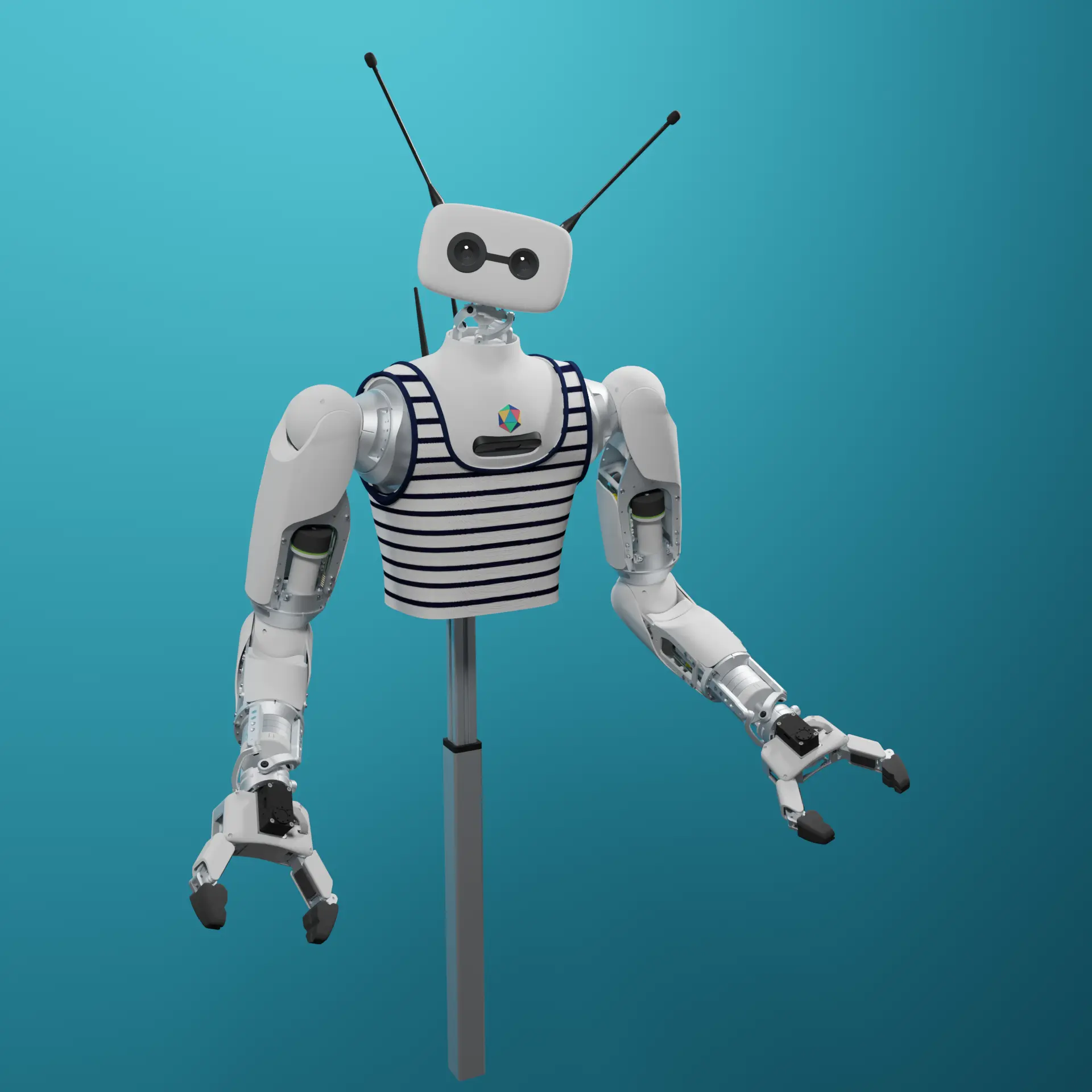
Reachy 2 Dual Arm
Reachy 2 Single Arm
